← zpět na zápisky z Arduino projektů
Robopixle ovládaná pomocí Bluetooth z Python konzole
- Co je potřeba umět
- Foto
- Hardware
- Jak to funguje
- Schéma zapojení
- Program pro Robopixli
- Program pro ovládací Python konzoli
- Možná vylepšení
- Poznatky
První verze dálkově ovládaného robota, který běhá po zemi. Zatím jen ovládaná pomocí Bluetooth a Python konzole. Do budoucna snad předěláme na něco jiného.
Co je potřeba umět
- Vrtat vrtačkou do krabice :-)
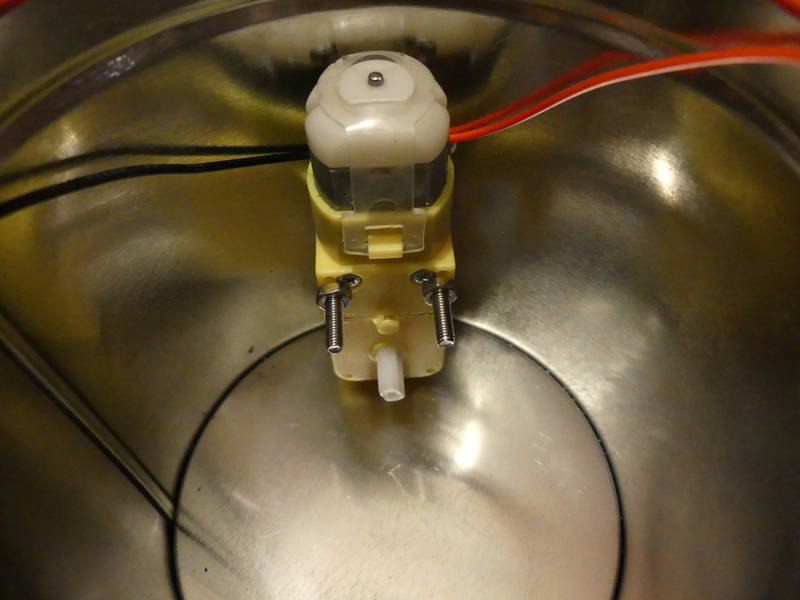
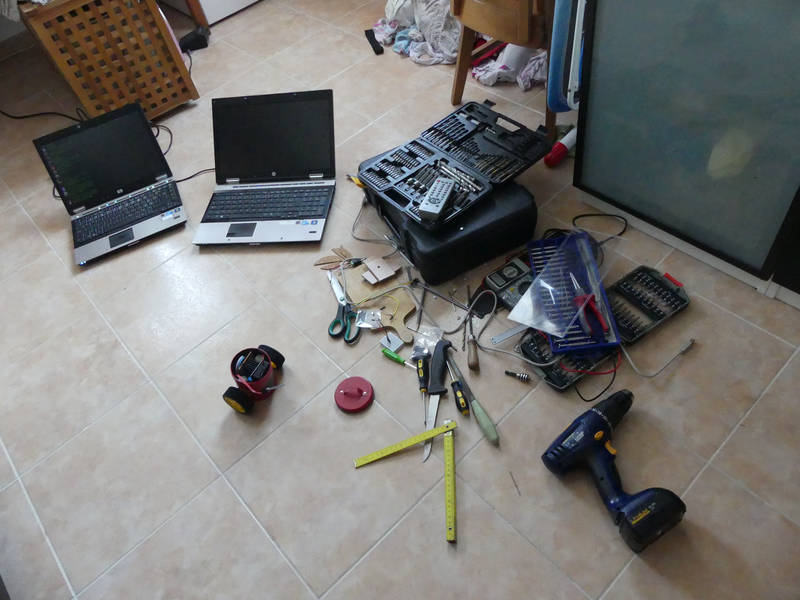
Foto
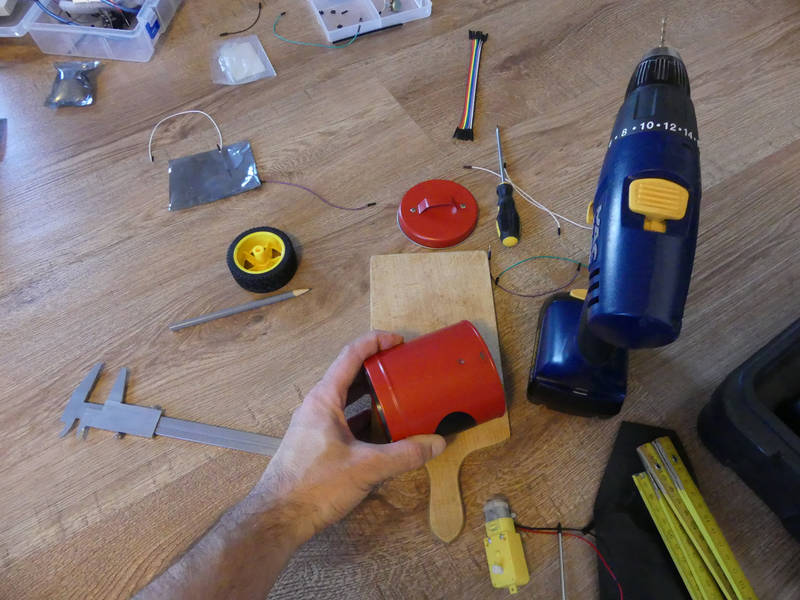






Hardware
- Kovová krabička od čaje (nebo jakákoliv jiná, plastová bude taky dobrá a navíc přes ni projde signál)
- 2 motory, použili jsme TT motor (Aliexpress)
- 2 kola (Aliexpress)
- Dual motor driver L298N (Aliexpress, specifikace)
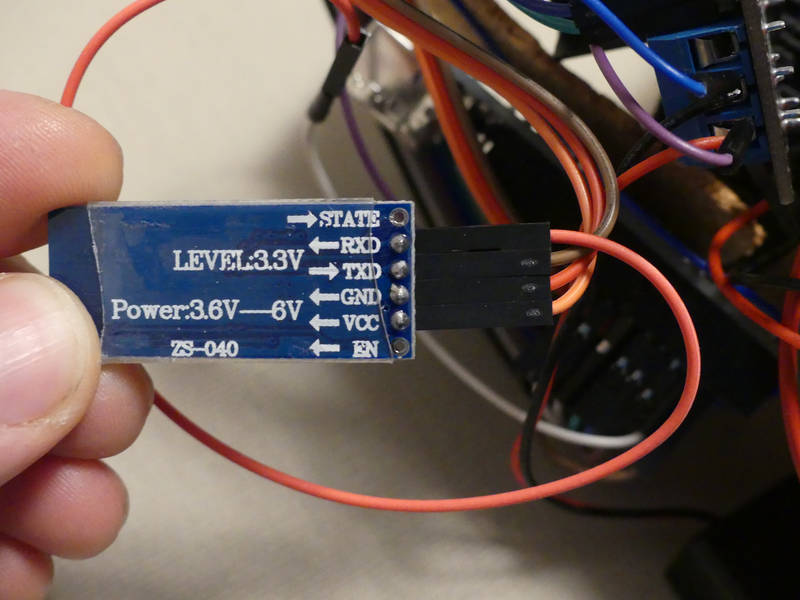
- Bluetooth modul, my jsme použili modul HC-06 (Aliexpress, specifikace)
- Bateriové napájení, my jsme použili 2× Lion 18650 s držákem, který má i vypínač (Aliexpress)
- Pro zabránění zkratu v pixli jsme použili korkovou podložku pod sklenici
- Tento projekt nevyžaduje nepájivé pole, obešli jsme se bez něj (nejspíš by se do pixle nevešlo)
Jak to funguje
Bluetooth
Jak už jsem zmínil, Bluetooth byla nouzová bezdrátová technologie, protože cílem bylo do večera daného dne zprovoznit bezdrátově Robopixli a poslední infra sensor jsem nešťastnou náhodou upálil. Wifi modul ani jiné bezdrátové technologie nebyly zrovna po ruce. Současně to ale byla i zajímavá příležitost si Bluetooth modul vyzkoušet, protože jsme s ním nikdy ještě nic nedělali.
Bluetooth a Linux
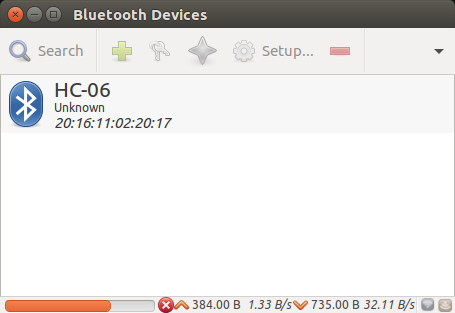
Nejdříve je potřeba zařízení napárovat s počítačem, který ho bude ovládat. Párovali jsme s Linuxem, tedy jsme pro snadnější práci se zařízeními doinstalovali program Bluetooth manager.
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install blueman
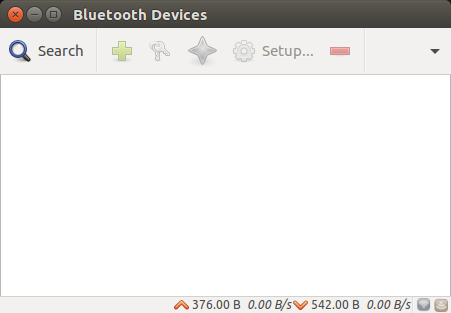
Tlačítkem search dáme vyhledat zařízení, Robopixle musí být zapnutá, Bluetooth modul modře bliká.
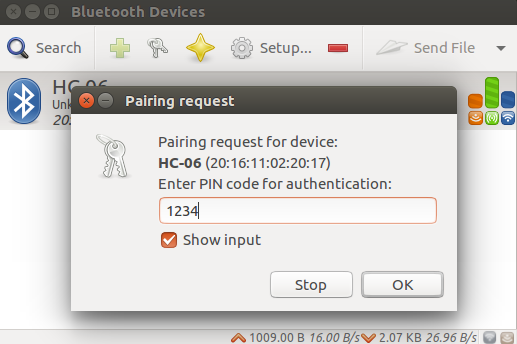
Pravé tlačítko na nalzezeném HC-06, vybrat volbu pair (spárovat) a vyplnit pin 1234.
Bluetooth a Python
Pro práci s Bluetooth v Pythonu je potřeba nainstalovat knihovnu PyBluez.
pip install pybluez
Python Program pro ovládání Robopixle viz níže.
Bluetooth a Arduino
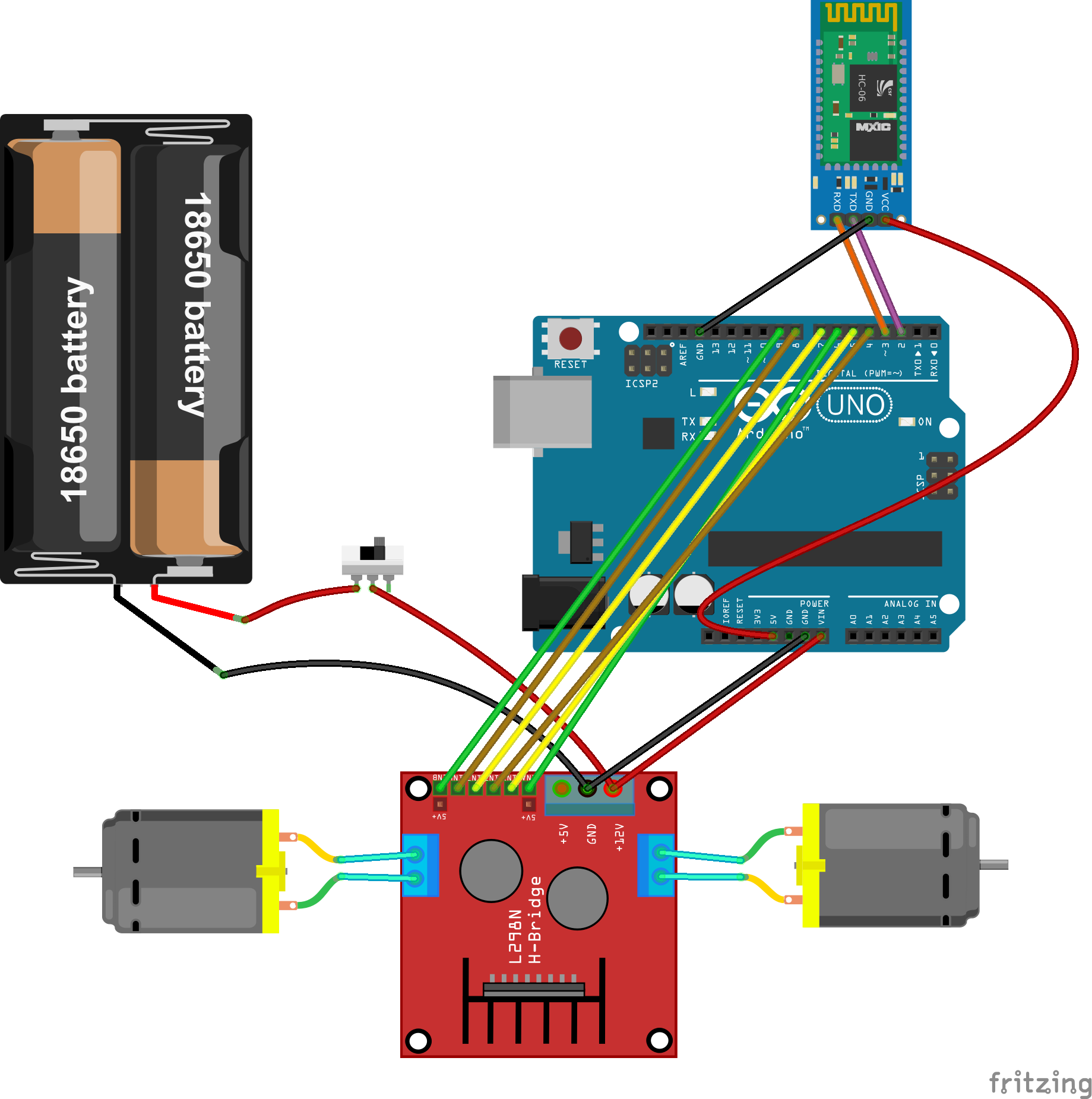
Používáme knihovnu SoftwareSerial - to proto, aby nebylo nutné při nahrávání kódu do Arduina odpojovat Bluetooth modul - ten totiž blokuje TX/RX piny a hádá se to. SoftwareSerial umožňuje Bluetooth připojit na jiné piny Arduina a provozovat sériovou komunikaci tam, je pak možné vše provozovat pohodlně najednou.
Jen taková nápověda: RX pin Bluetooth modulu přijde zapojit na TX Arduina a TX Bluetooth na RX Arduina. Trochu nás to potrápilo, ale smysl to dává :-)
L298N dual motor driver
Dvoumotorový řadič, který si poradí i s vyšším napětím. Umožňuje jednoduše ovládat 2 motory nezásvisle oběma směry. Pomocí PWM je možné ovlivňovat i rychlost motorů.
Parametry:
- vstupní napětí: 5 V - 46 V
- špičkový proud: 2 A
- maximální výkon: 25 W
- pracovní teplota: -25 ℃ - +130 ℃
V našem případě z jeho vstupních svorek přivádíme napětí do Arduina, jelikož to eliminuje nepájivé pole v pixli (a pájení). A to se hodí hlavně z hlediska prostoru.
Napájení
Krabice pro Robopixli není na výšku dostatečně vysoká, aby mohlo mít Arduino napájení přes konektor (ať už USB nebo jack). Bylo potřeba prozkoumat jiné možnosti napájení přímo přes piny Arduina. - z baterie jde tedy do GND a + jde do Vin pinu.
Schéma zapojení
Program pro Robopixli
#include <SoftwareSerial.h>
// piny pro software serial
const int rxpin = 2;
const int txpin = 3;
// inicializace software serial
SoftwareSerial bluetooth(rxpin, txpin);
char ch = 'A';
// pripojeni pinu motoru
// motor A
const int enA = 6;
const int in1 = 5;
const int in2 = 4;
// motor B
const int enB = 9;
const int in3 = 7;
const int in4 = 8;
// maximalne 255
const int rychlost = 100;
const int rychlostOtocka = 90;
const int delkaOtocka = 280;
const int delkaKrok = 1000;
void setup() {
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
//inicializace konzole
Serial.begin(9600);
Serial.println("Serial ready");
// inicializace bluetooth
bluetooth.begin(9600);
bluetooth.println("Bluetooth ready");
}
// pusti oba motory
// vpred = true, pokud ma jet vpred
// cas = pocet ms, jak dlouho pojede
void obaMotory(bool vpred, int cas) {
if (vpred) {
// motor A
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// motor B
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
} else {
// motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
// motor A
if (vpred) {
// drobna korekce nerovnomerneho navrtani motoru v pixli
analogWrite(enA, rychlost + 10);
} else {
analogWrite(enA, rychlost);
}
// motor B
analogWrite(enB, rychlost);
delay(cas);
zastavOba();
}
// pokus o otocku vlevo o 90 stupnu
void zahniVlevo() {
// motor A
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// motor A
analogWrite(enA, rychlostOtocka);
// motor B
analogWrite(enB, rychlostOtocka);
delay(delkaOtocka + 30);
zastavOba();
}
// pokus o otocku vpravo o 90 stupnu
void zahniVpravo() {
// motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// motor B
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// motor A
analogWrite(enA, rychlostOtocka);
// motor B
analogWrite(enB, rychlostOtocka);
delay(delkaOtocka + 30);
zastavOba();
}
// zastaveni obou motoru
void zastavOba() {
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop() {
if(bluetooth.available()){
// nacti znak z bluetooth
ch = bluetooth.read();
// vypis na konzoli
Serial.println(ch);
if (ch == 'F') {
Serial.println("Forward");
obaMotory(true, delkaKrok);
} else if (ch == 'B') {
Serial.println("Backward");
obaMotory(false, delkaKrok);
} else if (ch == 'R') {
Serial.println("Right");
zahniVpravo();
} else if (ch == 'L') {
Serial.println("Left");
zahniVlevo();
}
}
delay(10);
}
Program pro ovládací Python konzoli
Program pro ovládání je velmi jednoduchý, páruje se automaticky na první zařízení, které na Bluetooth síti nalezne, vůbec neinteraguje s uživatelem, že by mu dával na výběr. Že je spárováno je možné poznat jak na displeji počítače (objeví se výzva k zadávání pohybových příkazů), tak na Robopixli, kde přestane blikat modrá LED Bluetooth modulu a začne trvale svítit.
Ovládání Robopixle probíhá pomocí jednoduchých příkazů sestávajících ze 4 písmen:
F= forward (dopředu), pixle popojede kousek dopředuB= backward (dozadu), pixle popojede kousek dozaduL= left (vlevo), pixle se otočí asi o 90° vlevoR= right (vpravo), pixle se otočí asi o 90° vpravo- Enter = odeslání sestavy příkazů Robopixli, ta je začne obratem provádět (připravte si místo na podlaze!)
- Program se přerušuje pomocí
Ctrl+C.
# pybluez
import bluetooth
# hledame zarizeni
print "Hledam zarizeni..."
print ""
nearby_devices = bluetooth.discover_devices()
# vyber prvni zarizeni ze seznamu
selection = 0
bd_addr = nearby_devices[selection]
port = 1
sock = bluetooth.BluetoothSocket(bluetooth.RFCOMM)
# odpojeni
def disconnect():
sock.close()
# posilani dat
def send(data):
sock.send(data)
# pripoj se k zarizeni
sock.connect((bd_addr, port))
print 'Spojeno.'
print 'Cekam na prikazy pro Robopixli. Mozne prikazy jsou: F = dopredu, B = dozadu, L = vlevo, R = vpravo.'
# nekonecne opakovani, prerusi se Ctrl+C
while True:
# nacti znak ze vstupu z klavesnice
ch = raw_input();
# posli pres BT
send(ch)
disconnect()
Možná vylepšení
Možných vylepšení je mnoho a chystáme je.
Poznatky
- Jak je nakonec z fotek vidět, je dobré si dopředu vše proměřit, zda se do krabice robopixle vejde. Nám to vyšlo tak tak. Uno je velké, motory také a o driveru motorů s velkým chladičem ani nemluvě.
- Kovová krabice je odolná, ale mistr Farraday se nám smál, když jsme se snažili chytit nějaký signál. Bylo potřeba vyvrtat díru pro Bluetooth modul, aby mohla anténa čouhat ven.
- Motory jsou silné a je potřeba je pomocí PWM trochu brzdit.
- Kola nejsou přímo naproti sobě, takže to mírně zanáší, to lze trochu korigovat rozdílnou rychlostí kol.
- Motory nejsou krokové, takže lze zapomenout na přesný pohyb (robot neoběhne čtverec tak, aby se vrátil do původního místa). Kdyby byly krokové, byly by významně dražší a pomalejší, takže si musíme vybrat. Ukázalo se, že to asi nebude nikomu vadit, robot bude řešit jiný typ úloh.
- Napájení pomocí 2× Lion 18650 dá v plně nabitém stavu asi 8,4 V, po nějakém větším trápení dětmi napětí rychle klesá k 7 V, z toho si ještě odeberou motory, takže na Arduino zbývá už málo. Pod 7 V je Arduino Uno nestabilní (a v reálu se to projevuje tak, že to dělá blbiny, neposlouchá, neslyší a nechce slyšet). Možná vyzkoušíme ještě napájení 9 V Lion.